Mit allen Sinnen erfahren
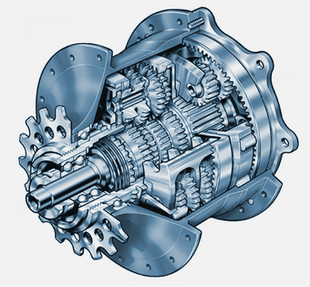
Hoch präzise Antriebstechnik für das Fahrrad in höchster Fertigungsqualität. Für mehr als nur ein Radleben. Mit geringsten Folgekosten. Rohloff setzt die Standards für Nachhaltigkeit von Fahrradgetrieben.
Produkte von Rohloff stehen im sportlichen Hochleistungseinsatz ebenso im Blickpunkt der Fahrradwelt wie im Radreise-Dauerbetrieb. Die SPEEDHUB-Getriebenabe ist die ideale Ergänzung selbst für leistungsstärkste E-Bikes. Und die SPEEDHUB hält größten Kräften bei Tandem- oder Cargo-Bikes stand.
News
Alles rund um die Rohloff AG und die SPEEDHUB


Produktnews
Produktnews sowie alle wichtigen Neuerungen


